![]() Satélite multimodo serie E108-GN
Satélite multimodo serie E108-GN
Módulo de Posicionamento e Navegación
Manual de usuario
Serie E108-GN
POSICIONAMENTO POR SATÉLITE MULTI-MODO GPS/BEIDOU E
MÓDULO DE NAVEGACIÓN
Exención de responsabilidade
EBYTE resérvase todos os dereitos sobre este documento e a información contida nel.
Os produtos, nomes, logotipos e deseños aquí descritos poden estar suxeitos total ou parcialmente a dereitos de propiedade intelectual. Queda terminantemente prohibida a reprodución, uso, modificación ou divulgación a terceiros deste documento ou de calquera parte deste sen o permiso expreso de EBYTE.
A información contida aquí ofrécese "tal como está" e EBYTE non asume ningunha responsabilidade polo uso da información. Non se ofrece ningunha garantía, nin expresa nin implícita, con respecto á exactitude, corrección, fiabilidade e adecuación para un propósito particular da información. Este documento pode ser revisado por EBYTE en calquera momento. Para consultar os documentos máis recentes, visite www.cdebyte.com.
Produto rematadoview
1.1 Introdución ao produto
A serie E108-GN é un módulo de navegación e posicionamento por satélite multimodo de alto rendemento, alta integración, baixa potencia e baixo custo, para BDS/GPS/GLONASS, tamaño pequeno e baixo consumo de enerxía, que se pode usar para a navegación do coche. , desgaste intelixente, Na aplicación do posicionamento GNSS como os drons, tamén ofrece interfaces de software e hardware compatibles con outros fabricantes de módulos, o que reduce moito o ciclo de desenvolvemento do usuario.
O módulo adopta o deseño integrado de banda base de RF, integra DC/DC, LDO, RF front-end, procesador de aplicacións de baixa potencia, RAM, almacenamento flash, RTC e xestión de enerxía, etc. Admite osciladores de cristal ou entrada de reloxo de pin externo, que se pode introducir a través dunha batería de moeda ou un capacitor faradio alimenta o RTC e a memoria RAM de copia de seguridade para reducir o tempo para a primeira reparación. Tamén admite unha variedade de formas de conectarse con outros periféricos e admite interfaces UART e GPIO. Se precisa interfaces I2C e SPI, póñase en contacto co servizo de atención ao cliente para personalizar. 
1.2 Características
- Admite posicionamento conxunto de sistemas múltiples BDS/GPS/GLONASS e posicionamento independente dun único sistema:
- Posicionamento diferencial D-GNSS, posicionamento asistido por A-GNSS, predición de efemérides, aplicación de navegación integrada DR, a taxa de actualización de datos máis rápida 10Hz;
- Procesador de aplicacións de 32 bits, a frecuencia máis alta é de 133 MHz, admite o axuste de frecuencia dinámico;
- Soporte de saída PPS;
- Controlador de reinicio integrado;
- UART, interface GPIO;
- RITC: admite oscilador de cristal de 32.768 KHz = 20 ppm, saída de reloxo 1.1 VRTC, admite a activación do sinal externo;
- Formato de saída: compatible con NMEAO183V4. 1 e versións anteriores, a frecuencia máxima de actualización fixa pode alcanzar os 10 Hz;
- Alta sensibilidade: captura arranque en frío -149dBm, arranque en quente -162dBm, seguimento -166dBm;
- O software e o hardware son compatibles cos doutros fabricantes, o que reduce moito o ciclo de desenvolvemento do usuario;
1.3 Aplicación
- Equipos de posicionamento e navegación de vehículos:
- Dispositivos que se poden levar, como rastreadores GPS, etc.;
- posicionamento UAV, ordenador industrial, etc.;
- Equipos da industria que precisan de posicionamento ou navegación GNSS;
Copyright © 2012-2021. Chengdu Ebyte Electronic Technology Co. Ltd
Especificación e parámetros
2.1 Parámetro de traballo
| Principais parámetros | Rendemento | Observacións | |||
| Min. | Típ. | Máx. | |||
| Vol. De traballotage (V) | 3.0 | 5.0 | 6. | > 5.0 V pode garantir a potencia de saída | |
| Nivel de comunicación (V) | 3. | Risco de quemado con 5V TTL | |||
| Temperatura de traballo (°C) | 45 | – | +85 | Deseño de grao industrial | |
| Banda de frecuencia de traballo (MHz) | 2400 | – | 2518 | Admite banda ISM | |
| Poder consumo |
Corrente de emisión (mA) | 35 | Consumo de enerxía instantáneo | ||
| Corriente de recepción (mA) | 20 | ||||
| Corrente de sono (pA) | 120 | Apagado de software | |||
2.2 Parámetro de hardware
| Principais parámetros | Descrición | Observacións |
| Velocidade de transmisión (bps) | 9600-921600 | Predeterminado 9600 |
| Bits de datos | 8 bits | |
| Pare un pouco | 1 | |
| Interface de comunicación | UART (TXD/RXD) ou GPIO | |
| Método de envasado | Medio burato | SMT |
| Dimensións | Consulte o capítulo 3 Definicións de pin | |
| Interface da antena | Stamp burato | |
| Carta de acordo | Soporta NMEA0183 V4.1 e versións anteriores | Frecuencia máxima de actualización fixa de ata 10 Hz |
| Sistemas de posicionamento compatibles | BDS/GPS/GLONASS |
2.3 Parámetro de rendemento do GPS
| Categoría | Elemento índice | Valor típico | Unidade |
| Tempo de posicionamento (condición de proba 1) | Arranque en frío | 28. | s |
| Inicio quente | <1 | s | |
| Recaptura | <1 | s | |
| Tempo de posicionamento (condición de proba 1) | A-GNSS | <10 | s |
| Sensibilidade (condición de proba 2) | Arranque en frío | -149 | dBm |
| Inicio quente | -162 | dBm | |
| Recaptura | -164 | dBm |
| Pista | -166 | dBm | |
| Precisión (Condición de proba 3) |
Precisión de posicionamento horizontal | 3. | m |
| Alta precisión de posicionamento | 4. | m | |
| Velocidade de precisión de posicionamento | 0.1 | m/s | |
| Precisión do tempo | 30 | ns | |
| Consumo de enerxía (Condición de proba 4) |
Captura de corrente | 35 | mA |
| Corrente de seguimento | 20 | mA | |
| Temperatura de funcionamento | — | -35°C-85°C | — |
| Temperatura de almacenamento | — | -55°C-100°C | — |
| Humidade | — | 5%-95%RH (sen condensación) | — |
Nota: Os resultados anteriores son o modo de traballo de modo dual GPS/Badious; a altitude máis alta pode alcanzar os 18,000 metros, pero a precisión dos datos desviarase despois de máis de 10,000 metros.
[Condición de proba 1]: o número de satélites receptores é superior a 6, a intensidade do sinal de todos os satélites é de -130 dBm, o valor medio obtense para 10 probas e o erro de posicionamento está dentro de 10 metros.
[Condición de proba 2]: a cifra de ruído do LNA externo é de 0.8, o número de satélites receptores é superior a 6 e o valor de intensidade do sinal recibido baixo a condición de bloquearse en cinco minutos ou non perder o bloqueo.
[Condición da proba 3]: Entorno aberto e sen obstáculos, 24 horas de proba de encendido continuo, 50 % de CEP.
[Condición de proba 4]: o número de satélites receptores é superior a 6 e a intensidade do sinal de todos os satélites é de -130 dBm.
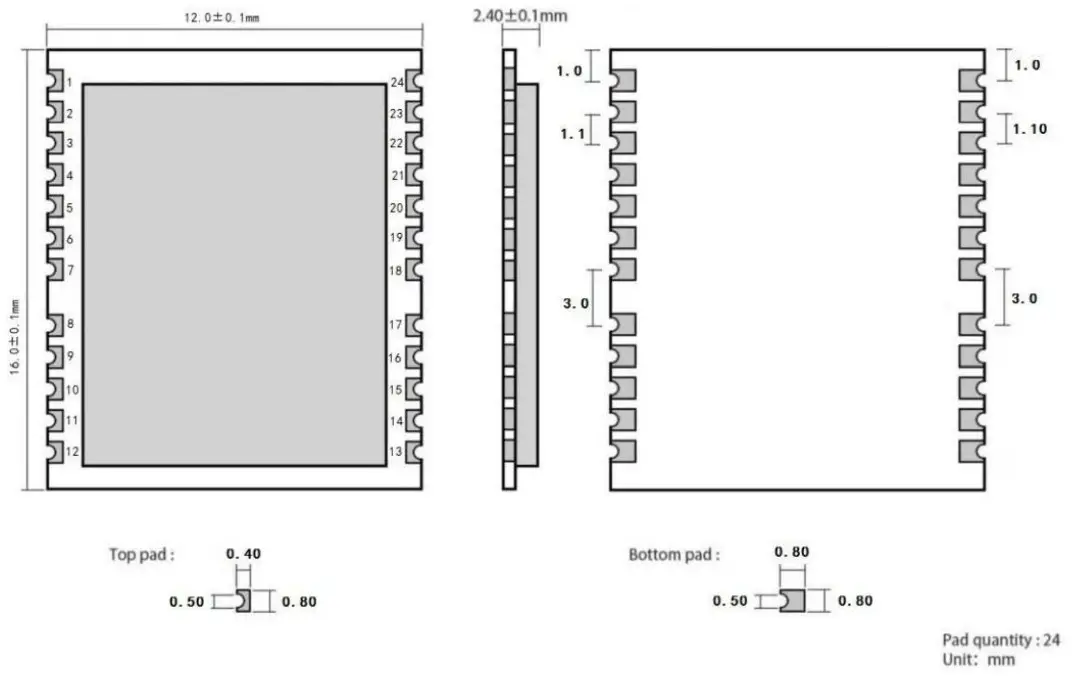
Definición de tamaño e pinos
3.1 Definición de pins E108-GNO1
| Non. | Nome | Dirección | Función |
| 1 | NC | Quedaron pinos | |
| 2 | NC | Quedaron pinos | |
| 3 | 1 PSP | Indicador de situación | Se o posicionamento é exitoso, sairá unha onda cadrada |
| 4 | EINT3 | Interrupción externa 3 | Predeterminado: pull-down, corrente de unidade de 8 mA |
| 5 | FORCE_ ON | Píldora para espertar o sono | Cando o módulo entra en baixo consumo de enerxía, tire este pin alto para saír do modo de baixo consumo de enerxía (o nivel voltage deste pin é 1.1 V, se o nivel do pin de control non é 11 V, debe dividir o voltage) |
| 6 | EINTO | Interrupción externa 0 | Predeterminado: pull-down, corrente de unidade de 8 mA |
| 7 | NC | Quedaron pinos | |
| 8 | RSTN | Restablecer o pin | Tire alto por defecto, tire baixo para restablecer. |
| 9 | VCC_RF | Saída de potencia RF | Fonte de alimentación para antena activa (esta fonte de alimentación de saída de RF voltage é igual a VCC) |
| 10 | GND | Terra do módulo | |
| 11 | ENTRADA RF | Entrada de RF | |
| 12 | GND | Terra do módulo | |
| 13 | GND | Terra do módulo | |
| 14 | NC | Quedaron pinos | |
| 15 | NC | Quedaron pinos | |
| 16 | RSTN | Restablecer o pin | Tire alto por defecto, tire baixo para restablecer |
| 17 | EINT1 | Externo 1 Interrupción | Predeterminado: pull-down, corrente de unidade de 8 mA |
| 18 | TX1 | Saída UART1 | (Reservado, nivel 28 V) |
| 19 | RX1 | Entrada UART1 | (Reservado, nivel 28 V) |
| 20 | TXD | Saída UART | (Porto AT, nivel de 28 V) |
| 21 | RXD | Entrada UART | (Porto AT, nivel de 28 V) |
| 22 | VBKP | Entrada de potencia RTC | A fonte de alimentación RTC debe estar alimentada, o módulo |
| 23 | VCC | Potencia do módulo | O módulo de inicio voltage precisa proporcionar un vol establetage de 4.2 V. Se o vol de iniciotage é inferior a este valor, pode que non se imprima o serialppon. Idade de inicio, pódese reducir anormal 3.3 pV voltage operación. |
| 24 | GND | Terra do módulo |

| Non. | Nome | Dirección | Función |
| 1 | GND | Potencia do módulo cable de terra |
|
| 2 | TXD | Saída | Saída UART (nivel de 2.8 V) |
| 3 | RXD | Entra | Entrada UART (nivel de 2.8 V) |
| 4 | 1 PSP | Seconoutdpu pulso | O usuario pode configurar a frecuencia, a duración, etc. mediante un comando |
| 5 | FORZAR | Pin de espertar do sono | Cando o módulo entra no consumo de enerxía ultra baixo, tire este pin alto para saír do modo de consumo de enerxía ultra baixo (este pin está alimentado |
| 6 | VBKP | Entrada de potencia RTC | O voltage é 11 V, se o nivel do pin de control non é de 11 V, debe dividir o voltage) |
| 7 | NC | Quedaron pinos | |
| 8 | VCC | Potencia do módulo | (2.8 V-4.2 V) |
| 9 | RSTN | Restablecer o pin | Tire alto por defecto, tire baixo para restablecer; |
| 10 | GND | Terra do módulo | |
| 11 | ENTRADA RF | Entrada de RF | |
| 12 | GND | Terra do módulo | |
| 13 | ANTON | Externo | LNA externo ou pin de control de potencia da antena activa Nivel de 28 V: |
| 14 | VCCRF | Saída de potencia RF | Fonte de alimentación para antena activa externa (esta saída de RF VCC voltage é igual a VCC) |
| 15 | NC | Quedaron pinos | |
| 16 | NC | Quedaron pinos | |
| 17 | NC | Quedaron pinos | |
| 18 | NC | Quedaron pinos |
3.3 Definición de pins E108-GNO02D
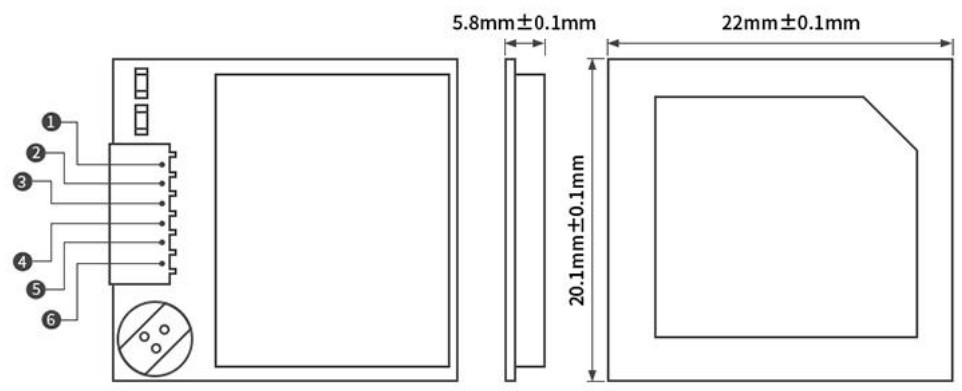
| Non. | Nome | Dirección | Función |
| 1 | CE | Terminal de activación de enerxía | Terminal de activación de enerxía, pódese baixar para entrar no modo de baixa enerxía (o predeterminado é alto) |
| 2 | 1 PSP | Saída 1PPS | Saída 1PPS, o usuario pode configurar a frecuencia, duración, etc. mediante comandos |
| 3 | GND | Cable de terra do módulo de alimentación | |
| 4 | TXD | saída | Saída UART (nivel de 2.8 V) |
| 5 | RXD | entrar | Entrada UART (nivel de 2.8 V) |
| 6 | VCC | Módulo de alimentación (3-.5.5 V) |
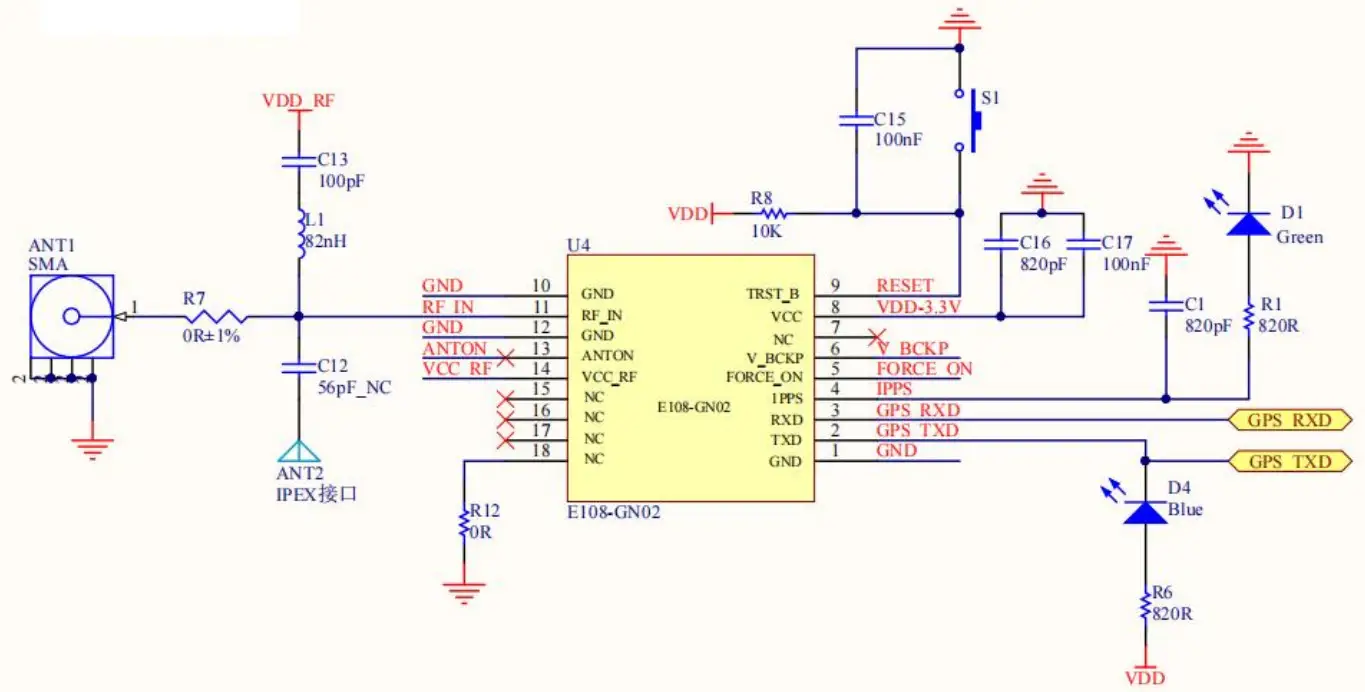
Diagrama de circuíto recomendado
4.1 E108-GNO1

4.2 E108-GN02
4.3 E108-GN02D

Deseño de hardware
- Para o deseño esquemático do módulo, pode consultar directamente o E108-GNO1-TB-SCH no paquete de datos;
- Recoméndase utilizar unha fonte de alimentación regulada en CC para alimentar o módulo, a ondulación da fonte de alimentación non debe exceder os 50 mV e o módulo debe estar conectado a terra de forma fiable;
- Preste atención á conexión correcta dos polos positivo e negativo da fonte de alimentación, como a conexión inversa pode causar danos permanentes no módulo;
- Comprobe a fonte de alimentación para asegurarse de que está entre o voltages. Se supera o valor máximo, o módulo quedará danado permanentemente;
- O porto serie TXD e RXD son de nivel LVTTL, se está conectado a un PC, debe ser convertido polo nivel RS232. Os usuarios poden usar este porto serie para recibir datos de información de posicionamento e actualizacións de software;
- Este módulo é un dispositivo sensible á temperatura e o seu rendemento degradarase debido a cambios graves de temperatura. Tenta manterse lonxe do fluxo de aire a alta temperatura e dos dispositivos de calefacción de alta potencia durante o uso;
- Ao deseñar o circuíto de fonte de alimentación para o módulo, a miúdo recoméndase reservar máis do 30% da marxe, para que toda a máquina poida funcionar de forma estable durante moito tempo;
- O módulo debe manterse lonxe de partes con grandes interferencias electromagnéticas, como fonte de alimentación, transformador e cableado de alta frecuencia na medida do posible. Debe evitarse o cableado dixital de alta frecuencia, o cableado analóxico de alta frecuencia e o cableado de alimentación baixo o módulo.
- Asumindo que o módulo está soldado na capa superior, a capa superior na parte de contacto do módulo está cuberta de cobre aterrado (todo cobre e ben conectado a terra), que debe estar preto da parte dixital do módulo e encamiñado pola parte inferior. Capa;
- Asumindo que o módulo está soldado ou colocado na capa superior, tamén é incorrecto dirixir arbitrariamente os fíos na capa inferior ou outras capas, o que afectará a sensibilidade perdida e de recepción do módulo en distintos graos;
- Asumindo que hai dispositivos con grandes interferencias electromagnéticas ao redor do módulo, tamén afectará moito o rendemento do módulo. Recoméndase manterse lonxe do módulo segundo a intensidade da interferencia. Se a situación o permite, pódese facer un illamento e apantallamento adecuados;
- Asumindo que hai rastros con grandes interferencias electromagnéticas ao redor do módulo (dixital de alta frecuencia, analóxico de alta frecuencia, rastros de enerxía), tamén afectará moito o rendemento do módulo. Recoméndase manterse lonxe do módulo segundo a intensidade da interferencia. illamento e apantallamento adecuados;
- A estrutura de instalación da antena ten unha gran influencia no rendemento do módulo, asegúrese de que a antena estea exposta e preferiblemente verticalmente cara arriba;
- Cando o módulo está instalado dentro da carcasa, pódese usar un cable de extensión de antena de alta calidade para estender a antena cara ao exterior da carcasa;
- A antena non debe instalarse dentro da carcasa metálica, o que debilitará moito a distancia de transmisión.
E108-Proba de produto
6.1 Asistente de porto serie
Proba baseada en E108-GNO1-TB, se non hai tarxeta de proba, podes consultar o diagrama esquemático do backplane no paquete de datos (este contido da proba tamén é aplicable a E108-GN02/D). 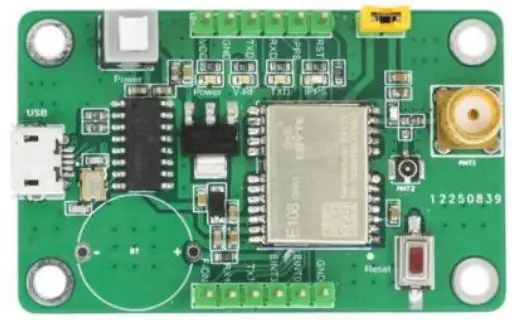
- Despois de conectar a antena GPS, conéctese ao ordenador a través do cable USB ao mesmo tempo, hai un porto USB no lado oposto da antena da placa e, a continuación, prema o botón de interruptor para acendelo.
- Teña en conta que cando se utiliza unha antena activa, os dous pinos de RE_POWER deben curtocircuitarse con puentes.
- Podes abrir o asistente de porto serie view os datos informados polo porto serie ou use o noso Navi Track para view iso.
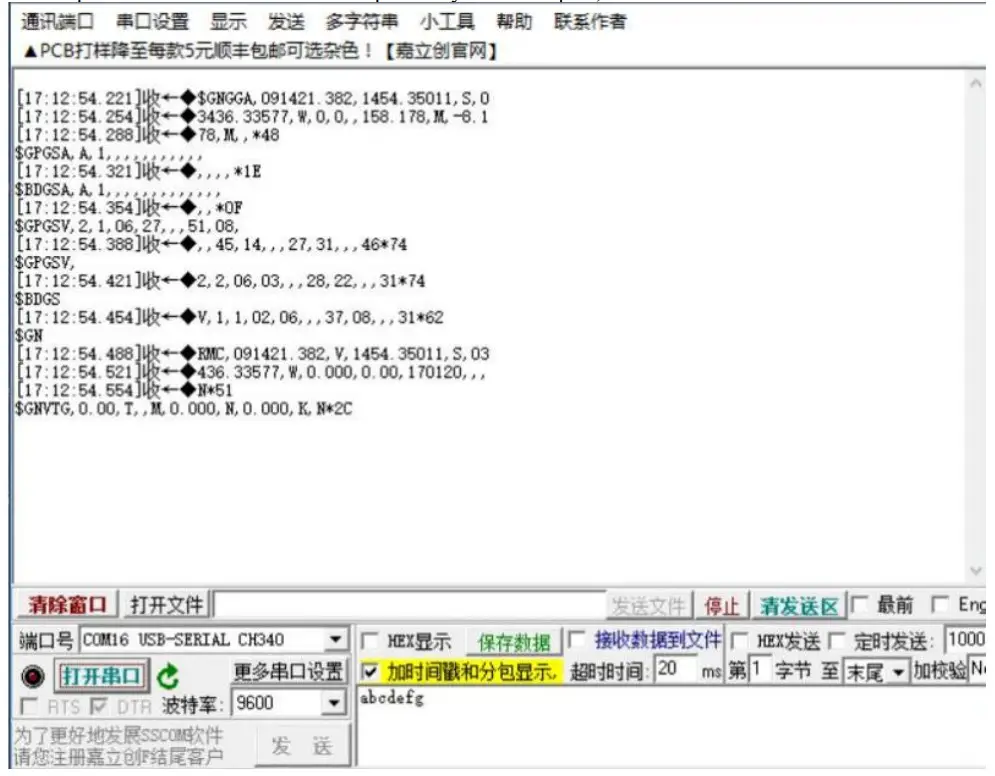
Cando a velocidade en baudios se establece en 9600 bps, os datos serán informados todo o tempo despois de abrir o porto serie. O formato de saída común é o seguinte:
GGA: hora, localización, número de satélites;
GSA: modo de funcionamento do receptor GPS, satélites utilizados para o posicionamento, valor DOP, estado de posicionamento;
GSV: información do satélite GPS visible, ángulo de elevación, ángulo de acimut, relación sinal-ruído;
RMC: hora, data, posición, velocidade;
VTG: información da velocidade terrestre (para máis detalles, consulte os protocolos NMEAO183);
6.2 Operación de naviTrack
Para comodidade de uso, recomendamos utilizar a ferramenta exclusiva TaviTrack para a depuración. Para obter máis información, consulte o "Manual do usuario de Navi Track".
- Executa Navi Track con privilexios de administrador e executa a seguinte páxina:
- Seleccione o porto de comunicación correspondente e prema en conectar. Despois de que a conexión teña éxito, podes ver os datos informados na xanela NMEA.
Nota: Para o significado detallado, consulte a descrición da Sección 3 Protocolo NMEAO183. - Despois de que o posicionamento teña éxito, a información de latitude e lonxitude pódese obter no campo SGPRMC informado polo porto serie.
Para obter información máis detallada sobre o uso da ferramenta, consulte a ferramenta. manual no kit.

Formato de comando
7.1 Formato de datos da interface GKC
A interface Gocke Command (GKC) é a interface para a interacción entre o usuario e o GK9501. O seu formato de comando é o seguinte:
| $PGKC | Comando | Argumentos | * | Suma de verificación | CR | LF |
7.2 Comando GKC
| Nome | Descrición | Observacións |
| Comando | Indica o número de comando enviado | O valor de referencia refírese á seguinte instrución GKC |
| argumentos | Indica os parámetros necesarios para enviar o comando, os parámetros poden ser múltiples e diferentes comandos corresponden a diferentes datos | O valor de referencia refírese á seguinte instrución GKC |
| * | sinal de fin de datos | |
| Suma de verificación | Datos de suma de comprobación para todo o comando | O valor da suma de verificación está no comando completo de PGKC a |
| CR. LF | sinal de fin do paquete | *O valor XOR do argumento anterior, como "SPGKCO30,3,1", o seu valor de verificación é o valor XOR de "PGKCO30,3,1", o seu valor XOR é 2E |
7.2. Mensaxe de resposta
Comando: 001 mensaxe de resposta
Resposta ao resultado do procesamento da mensaxe enviado pola outra parte
Argumentos:
Argil: o comando da mensaxe á que responde esta mensaxe
Arg2:
1″, a mensaxe recibida non é compatible
2″, mensaxe válida, pero execución incorrecta
3″, mensaxe válida e executada correctamente
ExampLe:
Enviar un único comando GPS: SPGKC115,1,0,0,0-2B
Mensaxe de resposta: SPGKC001,115,3,1,0,0,0,0,1*28
7.2.2 Reinicio do sistema
Comando: 030
Comando de reinicio do sistema
Argumentos:
Argl:
1″, inicio quente
2″, inicio quente
37, arranque en frío
4″, arranque completo en frío
Arg:
"17, reinicio do software
"2", reinicio de hardware
3″, borrar NV ram, manter o reinicio flash
ExampLe:
Comando de arranque en frío completo: SPGKC030,4,2#2 A Comando de inicio en quente: SPGKC030,1,1¥*2C
Observacións: Arg2 está configurado en 1 tanto para arranque en quente como para arranque en quente, e Arg? é 1, 2 e 3 para o arranque completo en frío.
En xeral, o arranque en frío é o modo de arranque en frío completo, Argl s configurado en 4, Arg2 está configurado en 2 e non se usa o modo de arranque de hardware.
7.2.3 Borrar información auxiliar
Comando: 040
Borrar información auxiliar en flashArgumentos: ningún
ExampLe:
$PGKC040*2B
7.2.4 Modo de baixa potencia
Comando: 051
Entra no modo de espera de baixo consumo
Argumentos:
Argl: "0", modo de parada
ExampLe:
$PGKCO051,0*37
Este comando pódese espertar enviando calquera comando, tamén se poden usar comandos non válidos, o hardware pódese espertar conectando e desconectando o porto serie e o comando orixinal de baixa potencia pódese enviar directamente.
7.2.5 Configuración do intervalo de mensaxes
Comando: 101
Configure o intervalo de saída de mensaxes NMEA (unidade: ms)
Argumentos:
Arxila: 100-10000
ExampLe:
SPGKC101,1000%02
O conxunto de comandos é emitir datos NMEA cada 1000 ms, o que é 1 s.
Observacións: ao configurar a saída do intervalo de mensaxes por riba de 2 HZ, primeiro aumente a velocidade en baudios a máis de 115200 para garantir a saída de mensaxes NMEA de alta frecuencia. Este comando non se garda en Flash e restaurarase á frecuencia de saída NMEA orixinal despois dun fallo de alimentación; velocidade en baudios A modificación require a versión de firmware 3.0 ou superior para admitir a configuración e a frecuencia NMEA non admite o gardar.
7.2.6 Modo periódico de baixa potencia
Comando: 105
Entra no modo periódico de baixa potencia
Argumentos:
Argl:
*0″, modo de funcionamento normal
"1, período de modo de seguimento de potencia ultra baixa
"4", ingresa directamente ao modo de seguimento de potencia ultra baixa
8", modo de baixo consumo de enerxía, pode espertar enviando comandos a través do porto serie
Arg2:
Tempo de execución (ms), este parámetro ten efecto en modo periódico con Arg1 = 1.
Arg3:
Tempo de sono (milisegundos), en modo periódico onde Argl é 1, este parámetro funciona.
ExampLe:
$PGKC105,8*3F
$PGKC105,1,5000,8000*3B
Nota: No modo de baixo consumo, a CPU durmirá e pódese espertar a través do porto serie; no modo de seguimento de potencia ultra baixa, cando a CPU está apagada, espertarase automaticamente periodicamente para a saída de posicionamento.
7.2.7 Establecer o modo de busca de estrelas
Comando: 115
Establece o modo de busca de estrelas
Argumentos:
Arxila:
"1", Gipson
“0”, GPS apagado
Arg2:
"1", recompila
"0", Despega
Arg3;
"1", Badious on
"0", Badious apagado
Argd:
"1", Galileo sobre
“0”, Galileo apagado
ExampLe:
Para configurar o modo de busca de estrelas no modo GPS único, o comando é o seguinte: $PGKC115,1,0,0,042B
Nota: Aínda que o comando único do modo Galileo SPGKC115,0,0,0,1*2B pódese enviar correctamente, o firmware GK9501 actual non admite o modo de busca de estrelas de Galileo.
7.2.8 Gardar modo de busca estrela
Comando:
121
Establece o modo de busca de estrelas, gárdao en flash
Argumentos:
Argl:
“1”, GPSon
“0”, GPS apagado
Arg2:
"1", Glonass activado
"0", Glonass desactivado
Arg3:
"1", Beidou en
"0", Beidou apagado
Argd:
“1”, Galileo on
“0”, Galileo apagado
ExampLe:
Establece o modo de busca de estrelas no modo GPS único
SPGKC121,1,0,0.0¥2C
Observacións: a diferenza entre os comandos Command115 e 121 é que o comando 115 non se gardará en flash despois da configuración, o modo de busca de estrelas definido desaparecerá despois de reiniciar, a configuración de comandos 121 gardarase en flash e o modo de busca de estrelas definido despois. o reinicio manterase Abaixo, nin 115 nin 121 admiten galaxias galileanas.
7.2.9 Configuración de parámetros do porto serie
Comando: 146
Establece o formato de entrada e saída do porto serie e a taxa de transmisión
Argumentos:
Argl:
37, formato NMEA
Arg2:
"37, formato NMEA
Arg3:
9600, 19200, 38400, 57600. 115200……921600.
ExampLe:
SPGKC146. 3. 3. 9600*0F
7.2.10 Establecer saída NMEA
Comando: 147
Establecer a velocidade en baudios de saída NMEA;
Argumentos:
Argl:
9600, 19200, 38400, 57600, 115200……921600,
ExampLe:
$PGKC 147,115200¥06
7.2.11 Eliminación do documento GPD
Comando: 047
Elimina o documento GPD en flash
Argumentos: ningún
ExampLe:
SPGKCO47*2C
7.2.12 Establecer o parámetro do porto serie NMEA
Comando: 149
Establecer o parámetro do porto serie NMEA
Argumentos:
Argl:
"0", datos NMEA
"1", datos binarios
Arg2: 9600. 19200, 38400, 57600. 115200……921600.
ExampLe:
SPGKC149. 0. 38400*2C
SPGKC149. 1. 115200%15
Observacións: Este comando adoita usarse en AGPS para cargar GPD files en Flash; a modificación da velocidade en baudios require a versión de firmware 3.0 o anterior para admitir a configuración;
7.2.13 Configuración de PPS
Comando:
161
Configuración PPS
Argumentos:
Argl:
"0", desactiva a saída PPS
"17, primeiro arranxo
27, corrección 3D
"37, corrección 2D/3D
"4", sempre activado
Arg2:
Ancho de pulso PPS (ms)
Arg3:
Período de pulso PPS (ms)
ExampLe:
SPGKCI61. 2. 500, 2000%0
Nota: O ancho máximo de pulso de PPS é de 998 ms, o mínimo é de 1 ms e o intervalo mínimo do período de pulso é de 1000 ms.
7.2.14 Intervalo de mensaxes de consulta
Comando: 201
Intervalo de consulta para mensaxes NMEA Argumentos: Ningún
ExampLe:
$PGKC201*2C
7.2.15 Intervalo de mensaxes de devolución
Comando: 202
Intervalo para devolver mensaxes NMEA (resposta ao comando 201)
Argumentos: ningún
ExampLe:
$PGKC202 . 1000. 0. 0. 0. 0. 0. 0*02
7.2.16 Definir a frecuencia de saída NMEA
mando; 242
Establece a frecuencia de saída da frase NMEA
Argumentos:
Argl: GLL
Arg2: RMC
Arg3: VIG
Argd: GGA
Argumentos: GSA
Arg6: GSV
Arg7: GRS
Arg8: GST
Argo~Arg21:
ExampLe:
Queda
$PGKC242,1,1,1,1,1,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0+37
7.2.17 Consulta a frecuencia de saída NMEA
Comando: 243
Consulta a frecuencia de saída das frases NMEA
Argumentos: ningún
ExampLe:
$PGKC243*2A
7.2.18 Devolve a frecuencia de saída NMEA
Comando: 244
Devolve a frecuencia de saída da frase NMEA (en resposta ao comando 243)
Argumentos:
Args: Consulte 242 Comandos
ExampLe:
$PGKC244,1,1,1,1,1,1,0,0,0,0,0,0,0,0,0,0.0,0,0,0,0%3 1
7.2.19 Establecer coordenadas de referencia
Comando: 269
Establecer coordenadas de referencia
Argumentos:
Arxila: “0”, WGS84
ExampLe:
$PGKC269.0*3E
7.2.20 Sistema de coordenadas de referencia de consulta
Comando: 270
Consulta o sistema de coordenadas de referencia
Argumentos: ningún
ExampLe:
$PGKC270*2A
7.2.21 Sistema de coordenadas de referencia de retorno
Comando: 271
Rerume ao marco de referencia (resposta ao comando 270)
Argumentos:
Argil: Consulte 269 Comandos
ExampLe:
$PGKC271. 0*37
7.2.22 Consultar o tempo RTC
Comando: 279
Consulta a hora RTC
Argumentos: ningún
ExampLe:
SPGKC279*23
7.2.23 Devolver o tempo RTC
Comando: 280
Devolver o tempo RTC (resposta ao comando 279)
Argumentos:
Argumentos:
Consulte 278 Comandos
ExampLe:
$PGKC280,2017,3,15,12,0,015
7.2.24 Establecer o limiar de velocidade
Comando: 284
Establece o limiar de velocidade, cando a velocidade é inferior ao limiar, a velocidade de saída é 0
Argumentos:
Argl:
Valor limiar
ExampLe:
$PGKC284.0.5*26
Nota: A unidade de velocidade é m/s. Se a velocidade está configurada nun número negativo, o comando non terá efecto e manterase a saída do limiar de velocidade orixinal.
7.2.25 Establecer limiar HDOP
Comando: 356
Establece o limiar HDOP, cando o HDOP real é maior que o limiar, sen posicionamento
Argumentos:
Argl: valor límite
ExampLe:
$PGK(C356,0.7;2*639A XNUMX
7.2.26 Obter o limiar HDOP
Comando: 357
Obter o limiar HDOP
Argumentos: ningún
ExampLe:
$PGKC357*2E
7.2.27 Consulta do número de versión
Comando: 462
Consulta o número de versión do software actual
Argumentos: ningún
ExampLe:
$PGKC462*2F
7.2.28 Devolve o número de versión actual
Comando: 463
Devolve o número de versión do software actual (responde ao comando 462)
Argumentos: ningún
ExampLe:
$PGKC463.GK9501_2.0_10 de agosto de 2020, GOKE micro semi *3F
7.2.29 Establecer a información de localización e hora
Comando: 639
Establece a información aproximada de localización e hora para un posicionamento máis rápido
Argumentos:
Argl: latitude, por exemplo: 28.166450
Arg2: lonxitude, por exemplo: 120.389700
Arg3: altura, por exemplo: 0
Argd: Ano
Args: mes
Argé: Día
Arg7: Hora, hora UTC
Arg8: puntos
Arg9: segundos
ExampLe:
SPGKC639.28.166450,120.389700,0,2017,3,15,12,0,0+33
Observacións: entre elas, a unidade de latitude e lonxitude son os graos, e a altura son os metros
7.2.30 Establecer o modo de posicionamento
Comando: 786
Establecer o modo de posicionamento
Argumentos:
Argl:
"0", modo normal
"1, modo de fitness para camiñar e trotar
2″, modo aerodinámico, axeitado para o modo deportivo de alta velocidade
3”, modo globo, para modo de elevación
ExampLe:
$PGKC786,1*3B
7.2.31 Consulta de información de identificación
Comando: 490
Consulta a información de identificación única de FLASH actual.
Argumentos: ningún
ExampLe:
SPGKC490*22
7.2.32 Devolver información de identificación
Comando: 491
Devolve a información de identificación única de FLASH actual (resposta ao comando 490)
Argumentos:
Argl:
Fabricación libre e ideado en Flash, por exemploampnúmero: 1351
Arg2:
UniqueID1, por exemploampCódigo: 32334C30,AE000230
Arg3:
UniqueID2, por exemploampCódigo: FF507900,FFFFFFFF
ExampLe:
$PGKC491,1351,32334C30,AE000230 FF507900,FFFFFFFF, *SE
7.3 Admite o protocolo NMEA0183
GK9501 admite o protocolo NMEAO183 V4.1 e é compatible con versións anteriores. Para obter máis información sobre NMEA0183 V4.1,
consulte o documento oficial NMEA 0183 V4.1. Os formatos de saída comúns son os seguintes:
GGA: hora, localización, número de satélites
GSA: modo de funcionamento do receptor GPS, satélites utilizados para o posicionamento, valor DOP, estado de posicionamento
GSV: información visible do satélite GPS, elevación, acimut, relación sinal-ruído RMC: hora, data, posición, velocidade
VTG: información da velocidade terrestre
7.3.1 Identificador de declaración
| Identificador de declaración | Descrición |
| BD | BDS, sistema de satélite Beidou de segunda xeración |
| GP | GPS |
| GL | GLONASS |
| GA | Galileo |
| GN | GNSS, sistema global de navegación por satélite |
732 GGA
$-GGA hhmmss.ss, ILILa,yyyyy.yy.ax
XXX XX X, MXXMX X, Xxx*hh
Sample data: $GPGGA,065545.789,2109.9551,N,12023.4047,E,1,9,0.85,18.1.M.8.0,M.,*5E
| Nome | A Example | Unidade | Descrición |
| ID da mensaxe | $ GPGGA | Cabeceira do protocolo GGA | |
| Hora UTC | 065545.789 | hhmmss.sss | |
| latitude | 2110. | ddmm.mmmm | |
| Indicación N/S | N | N = Norte, Sur | |
| lonxitude | 12023. | dddmm.mmmm | |
| Indicación E/W | E | W=oeste, leste | |
| Instrucións de posicionamento | 0: non localizado 1: Modo SPS, o posicionamento é válido 2: Diferencial, modo SPS, posicionamento é válido 3: Modo PPS, o posicionamento é válido |
||
| número de satélites | 9 | Rango de 0 a 12 | |
| HDOP | 0.85 | Precisión horizontal | |
| MSL amplititude | 18. | M | |
| unidade | M | M | |
| a terra | -2. | M | |
| unidade | M | – | |
| tempo diferencial | 8.0 | S | Non válido cando non hai DGPS |
| ID diferencial | 0 | ||
| suma de verificación | *5E | ||
| CR,> | Fin da mensaxe |
7.3.3 GSA
$-GSA,2,2 XX XXX XXX XXX X XXX X XXX X*hh
SampDatos do ficheiro: SGPGSA.A,3,10,24,12,32,25,21,15,2031,,,,1.25,0.85,0.91*04
| Nome | Example | Unidade | Descrición |
| ID da mensaxe | $GPGS | Cabeceira do protocolo GSA | |
| Modo 1 | A | M=manual, forza en modo 2D ou 3D | |
| Modo 2 | 3 | A=Automático | |
| uso de satélites | 10 | 1: posicionamento non válido; 2: posicionamento 2D; 3: 3D posicionamento |
|
| uso de satélites | 24 | Canle 1 | |
| uso de satélites | 12 | Canle 2 | |
| uso de satélites | 32 | Canle 3 | |
| uso de satélites | 25 | Canle 4 | |
| uso de satélites | 21 | Canle 5 | |
| uso de satélites | 15 | Canle 6 | |
| uso de satélites | 20 | Canle 7 | |
| … | … | … | … |
| uso de satélites | Canle 12 | ||
| PDOP | 1. | Precisión de posición | |
| HDOP | 0.85 | Precisión horizontal | |
| VDOP | 0.91 | precisión vertical | |
| suma de verificación | *04 | ||
| Fin da mensaxe |
7.3.4 GSV
$-GSVAXXXXXX,..*hh
Sampos datos:
$GPGSV.3,1,12,14,75,001,31,32,67,111,38,31,57,331,33,26,47,221,20 %73
$GPGSV.3,2,12,25.38,041,29,20,30,097,32,193,26,176.35,22,23,301 30 %47
$GPGSV.3,3,12,10.20,185,28,44,20,250,,16,17,217,21,03,14,315,*7D
| Nome | Example | Unidade | Descrición |
| ID da mensaxe | $ GPGSV | Cabeceira do protocolo GSV | |
| número de mensaxes | 3 | Rango de 1 a 3 | |
| número da mensaxe | 1 | Rango de 1 a 3 | |
| número de satélites | 12 | ||
| ID de satélite | 14 | Rango de 1 a 32 | |
| Ángulo de elevación | 75 | Grao | ata 90° |
| Azimut | 1 | Grao | Intervalo de 0 a 359° |
| Carrier-to-Noise Relación (C/No) |
31 | dBHz | Intervalo de 0 a 99, nulo se non hai rastro |
| ID de satélite | 32 | Rango 1 a 32 ata 90° | |
| Ángulo de elevación | 67 | Grao | |
| Azimut | 111 | Grao | Intervalo de 0 a 359° |
| Carrier-to-Noise Relación (C/No) |
38 | dBHz | Intervalo de 0 a 99, nulo se non hai rastro |
| ID de satélite | 31 | Rango de 1 a 32 | |
| Ángulo de elevación | 57 | Grao | ata 90° |
| Azimut | 331 | Grao | Intervalo de 0 a 359° |
| Carrier-to-Noise Relación (C/No) |
33 | dBHz | Intervalo de 0 a 99, nulo se non hai rastro |
| ID de satélite | 26 | Rango de 1 a 32 | |
| Ángulo de elevación | 47 | Grao | ata 90° |
| Azimut | 221 | Grao | Intervalo de 0 a 359° |
| Carrier-to-Noise Relación (C/No) |
20 | dBHz | Intervalo de 0 a 99, nulo se non hai rastro |
| suma de verificación | •73 | ||
| Fin da mensaxe |
7.3.5 RMC
$-—RMC hhmumss 55,4, I1LILa,yyyyy.yy.a
XXXX Xxxx,XX,a*hh example datas
$GPRMC,100646.000,A,3109.9704.N,12123.4219.E.0.257,335.62,291216,,,A*59
| Nome | Example | Unidade | Descrición |
| ID da mensaxe | $ GPRMC | Cabeceira do protocolo RMC | |
| Hora UTC | 100646.000 | hhmmss.ss | |
| estado | A | A=Datos válidos; V=Datos non válidos | |
| latitude | 2110. | ddmm.mmmm | |
| Indicación N/S | N | N=Norte, S=Sur | |
| lonxitude | 11123. | dddmm.mmmm | |
| Indicación FJW | E | W=oeste, E=leste | |
| velocidade terrestre | 0.257 | nó (sección) | |
| posición | 336. | grao | |
| data | 291216 | ddmmyy | |
| Variable magnética | – | ||
| suma de verificación | *59 | ||
| Fin da mensaxe |
7.3.6 VIG
$-VTGxXXXXMxXNxxK*hh
Sampdatos do ficheiro: $GPVTG.335.62,TM,0.257.N,0.477,KA*38
| Nome | Example | Unidade | Descrición |
| mensaxe II) | $ GPVTG | Cabeceira do protocolo VTG | |
| posición | 336. | grao | |
| referirse | T | Verdade | |
| posición | 336. | grao | |
| referirse | M | Magnético | |
| velocidade | 0.257 | nó (sección) | |
| unidade | N | sección | |
| velocidade | 0.477 | km/h | |
| unidade | K | km/h | |
| unidade | A | Indicación do modo do sistema de posicionamento: A—modo autónomo; D: modo diferencial; E—modo de estimación (dead reckoning); M: modo de entrada manual; S: modo simulador; N: os datos non son válidos. |
|
| suma de verificación | *a | ||
| Fin da mensaxe |
Guía de usuario do PIB
8.1 Introdución do PIB
GPD é un método de implementación definido por Gocke para conseguir o posicionamento asistido por AGPS. Usa principalmente os datos de navegación actuais Rinex file do IGS websitio, e despois convérteo na efeméride actual e transmíteo ao chip
a través do porto serie, realizando así o posicionamento acelerado do chip GPS.
8.2 Como obter o documento GPD.
Descarga o GPD file chega ao momento actual visitando o servidor GPD de Gocke websitio (http://wwvw.goke-agps.com:7777/brdcGPD.dat). Desde a efeméride en tempo real publicada no IGS webo sitio actualízase cada 2 horas, o GPD relativo file tamén se actualiza cada 2 horas.
8.3 Como usar GPD doc.
Carga ao chip a través do porto serie a través da ferramenta naviTrack proporcionada por GOKE.
- Despois de acender o chip, fai clic no botón "abrir" xunto á icona GPD de arriba e selecciona o GPD file descargado de Internet. Os seleccionados file a información móstrase debaixo da ferramenta.
- Despois do file se selecciona correctamente, fai clic no botón "enviar" e a ferramenta comeza a cargarse.
- Despois de esperar un tempo, aparecerá a caixa de indicación de finalización, que indica que a carga foi exitosa, se non, falla e volve cargar.
8.4 Como eliminar datos GPD no chipset
Dado que os datos GPD só son válidos durante 6 horas, se se supera o límite de tempo, os datos GPD almacenados no chip non terán ningún efecto. O usuario pode borrar os datos GPD no chip enviando comandos en serie. Por suposto, cada vez que se carguen novos datos GPD, primeiro borraranse os datos antigos GPD orixinais.
Comando de eliminación de datos GPD: escriba "PGK.C047" na caixa de entrada de comandos da ferramenta de navegación Navi Track.
8.5 O efecto despois de usar GPD
Dado que se adquiriron os datos das efemérides dos satélites visibles actualmente, o tempo de posicionamento pódese reducir de forma efectiva. Despois de usar GPD, o tempo de posicionamento do arranque en frío pódese mellorar uns 10 ~ 15 segundos. Especialmente no caso de sinal débil, é posible mellorar aínda máis a velocidade de posicionamento.
8.6 Métodos de localización asistida para acelerar GPD
Dado que a asistencia GPD pura tamén necesita confiar na información do tempo GPS do ceo de busca, ás veces, cando o sinal é pobre, aínda consume demasiado tempo. Establecer a información da hora actual e a información de coordenadas aproximadas mediante o comando PGKC639 pode conseguir un tempo de posicionamento máis rápido.
Nota: Cando se configura mediante o comando 639, o rango de latitude e lonxitude debe estar dentro de 20 km da posición real e a desviación do tempo non debe exceder os 5 minutos.
Comando: 639
Establece a información aproximada de localización e hora para un posicionamento máis rápido.
Argumentos:
Argl: latitude, por exemplo: 28.166450
Arg2: Lonxitude, por exampnúmero: 120.389700
Arg3: altura, p.ex.: 0 Arga: ano
Args: mes
Argumentos: día
Arg7: Hora, hora UTC
Arg8: puntos
Arg9: segundos
ExampLe:
SPGKC639.28.166450,120.389700,0,2017,3,15,12,0,0+33
Despois de executar correctamente o comando 639, GK9501 devolverá o seguinte formato: SPGKC001,639.3+21
8.7 Comunicación GPD
Principalmente a través da comunicación en serie para transmitir datos GPD ao chip en bloques. O proceso principal é o seguinte:
8.7.1 Cambiar a recepción NMEA ao modo de recepción BINARIO
(Para o formato de comando, consulte Formato de entrada e saída GK9501.pdf)
Enviar: tipo de mensaxe + modo alternar + velocidade en baudios + suma de verificación
Datos: SPGKC149,1,115200*15
(Tipo de mensaxe 149 para transporte GPD)
Recibir: cabeceira do paquete (2B) + lonxitude do paquete (2B) + tipo ACK (2B) + tipo de mensaxe (2B) + marca válida (1B) + suma de verificación (1B) + cola do paquete (2B)
Datos: Oxaa, 0xf0, 0x0c, 0x00, 0x01, 0X00, 0x95, 0x00, 0X03, (chk), 0x0d, 0x0a
(a suma de comprobación é un XOR byte a byte desde o inicio do campo de lonxitude do paquete ata o campo anterior á suma de comprobación)
8.7.2 Enviar o primeiro bloque de datos GPD, esperar a resposta ACK
Enviar: cabeceira do paquete (2B) + lonxitude do paquete (2B) + tipo de transmisión (2B) + número de paquete GPD (2B) + carga útil de datos (512B) + suma de verificación (1B) + cola de paquete (2B)
Datos: Oxaa, 0xf0, 0x0b, 0x02, 0X066, 0x02, 0x00, 0X00, …, (chk), 0x0d, Oa
Recibir: cabeceira do paquete (2B) + lonxitude do paquete (2B) + tipo ACK (2B) + número de paquete GPD (2B) + marca válida (1B) + suma de verificación (1B) + cola do paquete (2B)
Datos: Oxaa, 0xf0, 0x0c, 0x00, 0x03, 0X00, 0x00, 0x00, 0X01, (chk), 0x0d, 0x0a
8.7.3 Envíe os bloques de datos restantes en secuencia e agarde a resposta ACK
Enviar: cabeceira do paquete (2B) + lonxitude do paquete (2B) + tipo de transmisión (2B) + número de paquete GPD (2B) + carga útil de datos (512B) + suma de verificación (1B) + cola de paquete (2B)
Datos: Oxaa, 0xf0, 0x0b, 0x02, 0X066, 0x02, 0X01, 0X00, ......, (chk), 0x0d, 0a
(O GPD file está dividido en bloques de datos de 512 bytes para a transmisión, e o último bloque de menos de 512 bytes énchese con 0s)
Recibir: cabeceira do paquete (2B) + lonxitude do paquete (2B) + tipo ACK (2B) + número de paquete GPD (2B) + marca válida (1B) + suma de verificación (1B) + cola do paquete (2B)
Datos: Oxaa, 0xf0, 0x0c, 0x00, 0x03, 0X00, 0x01, 0x00, 0X01, (chk), 0x0d, 0x0a
8.7.4 Enviar declaración de fin de transferencia GPD e esperar a resposta
Enviar: cabeceira do paquete (2B) + lonxitude do paquete (2B) + tipo de transmisión (2B) + terminador GPD (2B) + suma de verificación (1B) + cola do paquete (2B)
Datos: Oxaa, 0xf0, 0x0b, 0x00, 0X066, 0x02, OXfF, OxfE, (chk), 0x0d, Oa
Recibir: cabeceira do paquete (2B) + lonxitude do paquete (2B) + tipo ACK (2B) + terminador GPD (2B) + marca válida (1B) + suma de verificación (1B) + cola do paquete (2B)
Datos: Oxaa, 0xf0, 0x0c, 0x00, 0x03, 0x00, Oxff, Oxff, 0x01, (chk), 0x0d, 0x0a
8.7.5 Cambiar a recepción BINARIA ao modo de recepción NMEA
Enviar: cabeceira do paquete (2B) + lonxitude do paquete (2B) + tipo de mensaxe (2B) + tipo de transmisión (1B) + taxa de baudios (4B) + suma de verificación (1B) + cola de paquete (2B)
Datos: Oxaa, 0xf0, 0x0e, 0X00, 0x95, 0X00, 0X00, 000, 0xc2, 0x01, 0x00, (chk), 0x0d, 0x0a
Recibir: cabeceira do paquete (2B) + lonxitude do paquete (2B) + tipo ACK (2B) + tipo de mensaxe (2B) + marca válida (1B) + suma de verificación (1B) + cola do paquete (2B)
Datos: Oxaa, 0xf0, 0x0c, 0x00, 0x01, 0X00, 0x95, 0x00, 0X03, (chk), 0x0d, 0x0a
(Marcadores de estado: 0 para non válido, 1 para non compatible, 2 para falla, 3 para éxito)
FAQ
9.1 O alcance de comunicación é demasiado curto
- A distancia de comunicación verase afectada cando exista obstáculo.
- A taxa de perda de datos verase afectada pola temperatura, a humidade e a interferencia co-canle.
- O chan absorberá e reflectirá a onda de radio sen fíos, polo que o rendemento será deficiente cando se faga unha proba preto do chan.
- A auga do mar ten unha gran capacidade para absorber ondas de radio sen fíos, polo que o rendemento será deficiente cando se faga unha proba preto do mar.
- O sinal afectarase cando a antena estea preto dun obxecto metálico ou se poña nunha caixa metálica.
- O rexistro de enerxía definiuse incorrectamente, a taxa de datos do aire está definida como demasiado alta (canto maior sexa a taxa de datos do aire, menor será a distancia).
- A fonte de alimentación de baixo voltage baixo a temperatura ambiente é inferior a 2.5 V, canto menor sexa o voltage, canto menor sexa a potencia de transmisión.
- Debido á calidade da antena ou á mala coincidencia entre a antena e o módulo.
9.2 O módulo é fácil de danar
- Comprobe a fonte de alimentación, asegúrese de que está no rango correcto. VoltagUn valor superior ao máximo danará o módulo.
- Comprobe a estabilidade da fonte de enerxía, o voltage non pode fluctuar demasiado.
- Asegúrese de tomar medidas antiestáticas ao instalar e utilizar os dispositivos de alta frecuencia que teñen susceptibilidade electrostática.
- Asegúrate de que a humidade estea dentro dun rango limitado, algunhas partes son sensibles á humidade.
- Evite usar módulos a unha temperatura demasiado alta ou moi baixa.
9.3 BER (taxa de erros BIt) é alta
- Hai interferencias de sinal co-canle nas proximidades, por favor estea lonxe de fontes de interferencia ou modifique a frecuencia e a canle para evitar interferencias;
- Unha fonte de alimentación deficiente pode provocar un código desordenado. Asegúrese de que a fonte de alimentación sexa fiable.
- A liña de extensión e a calidade do alimentador son deficientes ou demasiado longos, polo que a taxa de erro de bits é alta;
Instrucción de soldadura
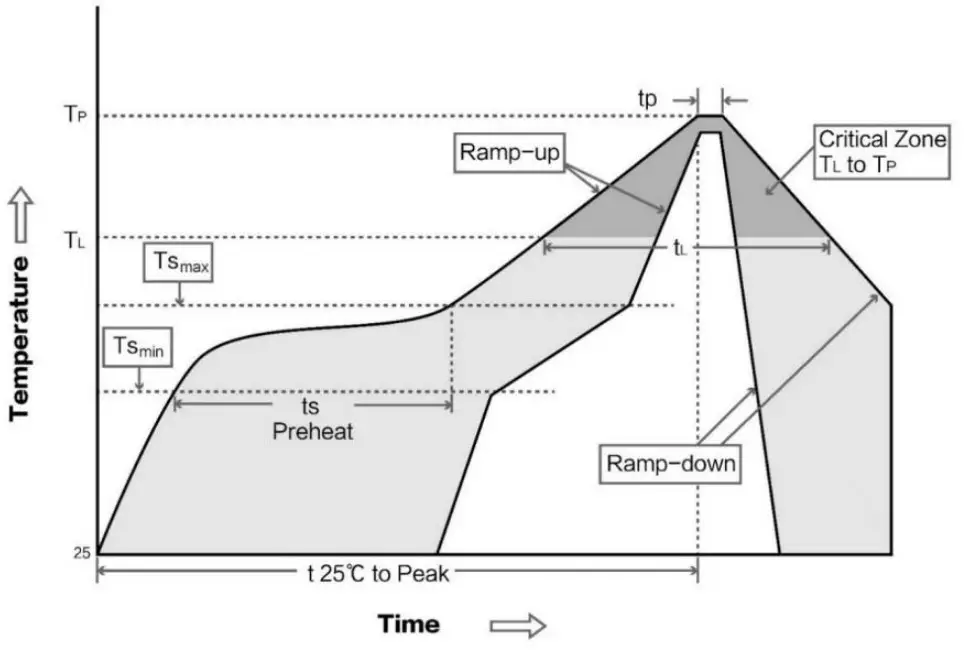
10.1 Temperatura de soldadura de refluxo
| Profile Característica | Montaxe Sn-Pb | Montaxe libre de Pb |
| Pasta para soldar | Sn63/Pb37 | Sn96.5/Ag3/Cu0.5 |
| Temperatura de precalentamento min (Tsmin) | 100°C | 150°C |
| Temperatura máxima de precalentamento (Tsmax) | 150°C | 200°C |
| Tempo de precalentamento (Tsmin a Tsmax) (ts) | 60-120 seg | 60-120 seg |
| Media ramptaxa de aumento (TsmaxtoTp) | 3°C/segundo máx | 3°C/segundo máx |
| Temperatura de líquido (TL) | 183°C | 217°C |
| Tempo (tL)Mantido por riba (TL) | 60-90 seg | 30-90 seg |
| Temperatura máxima (Tp) | 220-235 °C | 230-250 °C |
| R mediaamp-baixa (TptoTsmax) | 6°C/segundo máx | 60 segundos máx |
| Tempo de 25 °C ata o pico de temperatura 25 °C | 6 minutos máx | 8 minutos máx |
10.2 Curva de soldadura por refluxo
Serie E108
| Modelo No. | Chipset | Satélite | Paquete | Tamaño mm | Interface |
| E108-GN02 | GK9501 | BDS/GPS/GLONASS | SMD | 16*12%2.4 | UART/GPIO |
| E108-GN02D | GK9501 | BDS/GPS/GLONASS | SMD | 10.1% 9.7% 2.4 | UART/GPIO |
| E108-GNO1 | GK9501 | BDS/GPS/GLONASS | DIP | 22% 20% 5.8 | UART |
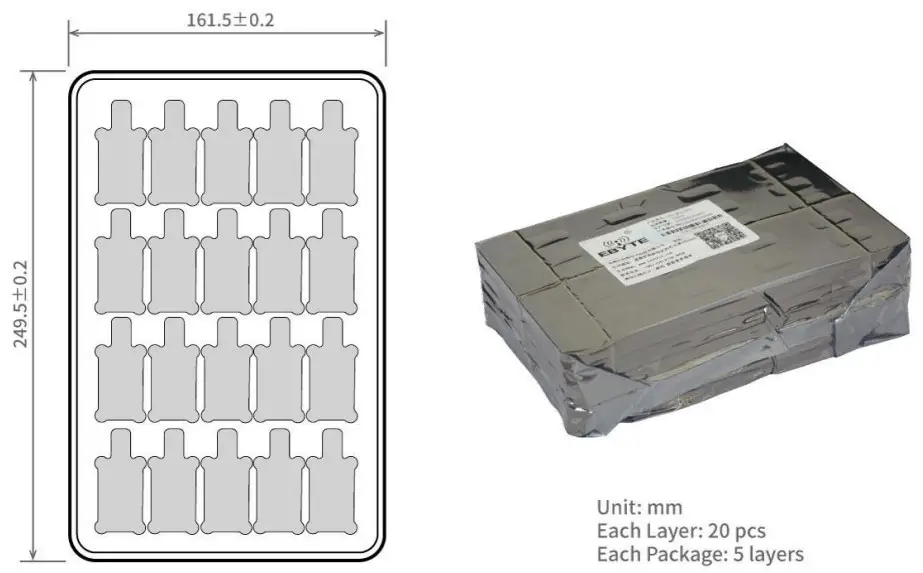
Embalaxe para pedido por lotes
Historial de revisións
| Versión | Data | Observación | by |
| v1.0 | 2020-08-28 | Versión orixinal | —_— |
| vi.1 | 2022-6-22 | Versión modificada | Yan |
Sobre nós
Soporte técnico: support@cdebyte.com
Ligazón de descarga de documentos e configuración de RF: www.ebyte.com
Grazas por usar os produtos Ebyte! Póñase en contacto connosco para calquera dúbida ou suxestión: info@cdebyte.com
Teléfono: +86 028-61399028
'Web: www.cdebyte.com
Enderezo: B5 Mold Park, 199# Xiqu Ave, High-tech District, Sichuan, China
![]() Chengdu Ebyte Electronic Technology Co.,Ltd.
Chengdu Ebyte Electronic Technology Co.,Ltd.
Copyright © 2012-2022,
Documentos/Recursos
 |
Módulo de navegación e posicionamento por satélite multimodo da serie EBYTE E108-GN [pdfManual do usuario E108-GN, Módulo de navegación e posicionamento por satélite multimodo da serie E108-GN, Módulo de navegación e posicionamento por satélite multimodo, Módulo de posicionamento e navegación por satélite, Módulo de posicionamento e navegación, Módulo de navegación |