![]()
Controlador paso a paso de bucle pechado T86-IO
Manual de usuario
Shenzhen Rtelligent Mechanical Electrical Technology Co., Ltd
Produto rematadoview
Grazas por escoller Rtelligent T series servo controlador dixital paso a paso. O servo paso a paso é un esquema de motor paso a paso formado a partir do motor paso a paso común de bucle aberto en combinación con feedback de posición e algoritmo de servo, que presenta alta velocidade, alto par, alta precisión, baixa vibración, baixa calefacción e sen perda de paso. Baseado na nova plataforma de chip de procesamento DSP de 32 bits de TI, o servocontrolador paso a paso da serie T utiliza o control orientado ao campo (FOC) e o algoritmo de control de debilitamento do campo vectorial no servocontrolador, que ten o rendemento de superar o paso a paso común en todos os aspectos. .
- A función de axuste de parámetros PID incorporada fai que o motor se adapte mellor á aplicación de diferentes tipos de cargas.
- O algoritmo de control de debilitamento do campo integrado fai que o motor reduza as características do campo magnético e manteña a potencia a alta velocidade.
- A función de control vectorial de corrente incorporada fai que o motor teña a característica actual de servo e calefacción baixa.
- O algoritmo de comando de micro-pasos integrado fai que o motor poida funcionar mantendo unha vibración estable e baixa a varias velocidades.
- A retroalimentación do codificador coa resolución de pulso integrada de 4000 fai que a precisión de posicionamento aumente e nunca perda o paso.
En conclusión, o esquema de servocontrol combinado coas características do motor paso a paso permite que o servocontrolador paso a paso da serie T exercer mellor o rendemento do motor paso a paso, que pode substituír a aplicación servo da mesma potencia. É unha nova opción de rendemento óptimo de custos para equipos de automatización.
O controlador T86-IO pode configurar a subdivisión e outros parámetros mediante o interruptor DIP e o software de depuración. Ten funcións de protección como voltage, actual e posición, e engade interface de saída de alarma. Os seus sinais de control de entrada e saída están illados ópticamente.
| Fonte de alimentación | 20-80 VAC 24 –100 VDC |
| Control de precisión | 4000 pulsos/r |
| Control actual | Algoritmo de control de vectores servo |
| Axustes de velocidade | Configuración do interruptor DIP ou configuración do software de depuración |
| Rango de velocidade | Convencional 1200 ~ 1500 rpm, ata 4000 rpm |
| Supresión de resonancia | Calcula automaticamente o punto de resonancia e inhibe a vibración IF |
| Axuste de parámetros PID | Software de proba para axustar as características do PID do motor |
| Filtrado de pulsos | Filtro de sinal dixital de 2 MHz |
| Saída de alarma | Saída de alarma de sobreintensidade, sobrevoltage, erro de posición, etc |
Agardamos que os nosos produtos cun excelente rendemento poidan axudarche a completar o programa de control deportivo con éxito.
Lea este manual técnico antes de usar os produtos.
Entorno de aplicación e instalación
Esixencia ambiental
| Elemento | Intelligent T86-IO |
| Contorno de instalación | Evite po, aceite e ambientes corrosivos |
| Vibración | 0.5 G (4.9 m/s2) Máx |
| Temperatura/humidade de funcionamento | 0 ℃ ~ 45 ℃ / 90 % RH ou menos (sen condensación) |
| Temperatura de almacenamento e transporte: | -10 ℃ ~ 70 ℃ |
| Refrixeración | Refrixeración natural / lonxe da fonte de calor |
| Grao impermeable | IP54 |
Dimensións de instalación do controlador

Requisitos de instalación do controlador
Instale o controlador vertical ou horizontalmente, coa súa parte frontal cara adiante e a parte superior cara arriba para facilitar o arrefriamento.
Durante a montaxe, evite perforacións e outras materias estrañas que caian no interior do condutor.
Durante a montaxe, use o parafuso M3 para fixalo.
Cando hai unha fonte de vibración (como unha perforadora) preto da posición de instalación, use un absorbedor de vibracións ou unha xunta de goma resistente ás vibracións.
Cando se instalen varios controladores no armario de control, preste atención a reservar espazo suficiente para unha disipación de calor suficiente. Se é necesario, pode configurar ventiladores de refrixeración para garantir boas condicións de disipación da calor no armario de control.
Porto do controlador e conexión
Descrición da función do porto
| Función | Grao | Definición | Observacións |
| Entrada de alimentación | AC | Entrada de alimentación de CA | AC 20-80V DC 24-100V |
| AC | Entrada de alimentación de CA | ||
| Conexión do motor | A+ | Terminal positivo do devanado de fase A | Vermello |
| A- | Terminal negativo do devanado de fase A | Amarelo | |
| B+ | Terminal positivo do devanado de fase B | Negro | |
| B- | Terminal negativo do devanado de fase B | Verde | |
| Conexión do codificador | EB+ | Terminal positivo da fase B do codificador | Verde |
| EB- | Terminal negativo da fase B do codificador | Amarelo | |
| EA+ | Terminal positivo da fase A do codificador | marrón | |
| EA- | Terminal negativo da fase A do codificador | Branco | |
| VCC | Potencia de traballo do codificador 5V positivo | Vermello | |
| GND | Potencia de traballo do codificador 5V terminal de terra | Azul | |
| Conexión de pulso | PUL+ | Iniciar a interface de entrada | Nivel 24V |
| PUL- | |||
| D1R+ | Interface de entrada de dirección | ||
| DIR- | |||
| Activa o terminal | ENA+ | Activar a interface de control | |
| ENA- | |||
| Saída de Mann | ALM+ | Interface de saída Mann | 24 V. abaixo |
| ALM- | |||
| Saída no lugar | Pende+ | Interface de saída de 40 mA no lugar | |
| pendente- |
Entrada de alimentación
A fonte de alimentación do controlador pode ser tanto AC como DC, e o vol de entradatagO rango é 20V~80VAC ou 24V~100VDC.
Non se conecte directamente á electricidade comercial (220 VCA).
Referencia de selección de potencia:
Voltage:
O motor paso a paso ten as características de diminución do par co aumento da velocidade do motor e o volume de entradatage afectará o amplititude de redución de par a alta velocidade. Aumentando correctamente o voltage da fonte de alimentación de entrada pode aumentar o par de saída do motor a alta velocidade.
O servo paso a paso ten unha saída de velocidade e torque máis alta que o paso a paso normal. Polo tanto, se quere obter un mellor rendemento de alta velocidade, cómpre aumentar o voltage do condutor.
Actual:
O proceso de traballo do controlador é converter a entrada de alto voltage e fonte de enerxía de baixa corrente no baixo voltage e alta corrente nos dous extremos do devanado do motor. No uso real, debe seleccionarse a fonte de alimentación adecuada segundo o modelo do motor, o par de carga e outros factores.
Os efectos da rexeneración voltage:
Cando o motor paso a paso está a funcionar, tamén conserva as características do xerador. Ao desacelerarse, a enerxía cinética acumulada pola carga converterase en enerxía eléctrica e superpoñerase ao circuíto do controlador e á fonte de alimentación de entrada.
Preste atención á configuración do tempo de aceleración e desaceleración para protexer o condutor ou a fonte de alimentación.
Cando o condutor está apagado, verá o indicador LED do condutor acendido cando se tira a carga para que o motor se mova, o que tamén se ve afectado.
Conexión do codificador
O codificador T86-IO ten unha saída diferencial A/B e está conectado na orde correspondente cando se usa.
| EB+ | EB- | EA+ | EA- | VCC | GND |
| Verde | Amarelo | marrón | Branco | Vermello | Azul |
Rtelligent está equipado cunha determinada lonxitude de cable codificador, compre cables de extensión de diferentes lonxitudes segundo as necesidades de instalación.
Conexión do motor
O motor correspondente do controlador T86-IO é o servomotor paso a paso da serie T correspondente e a súa orde de conexión do motor correspondente é fixa e única.

| A+ | Vermello |
| A- | Amarelo |
| B+ | Negro |
| B- | Verde |
Conexión de sinal de control
Porto PUL, DIR: conexión para o comando de arranque e parada
| e indicación de dirección | 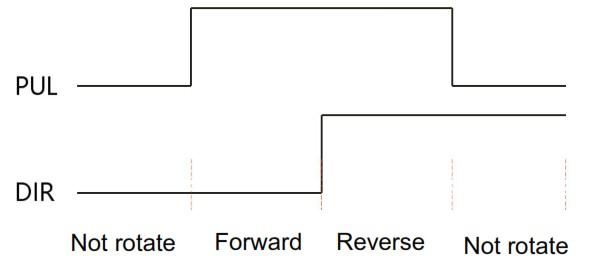 |
| 1. Con PUL activado e DIR apagado, o motor acciona para xirar cara adiante. Cando PUL está desactivado, o motor desacelera e para. 2. En PUL activado e DIR activado, o motor acciona para xirar cara atrás. Cando PUL está desactivado, o motor desacelera e para. 3.Ao PUL apagado, o motor para. |
Porto ENA: activar/desactivar
Cando o optoacoplador interno está apagado, o controlador envía corrente ao motor;
Cando o optoacoplador interno está acendido, o controlador cortará a corrente de cada fase do motor para liberar o motor e o pulso de paso non responderá.
Cando o motor está nun estado de erro, apágase automaticamente. A lóxica de nivel do sinal de activación pódese configurar ao contrario.
ALM, porto pendente: úsase para alarma e saída no lugar.
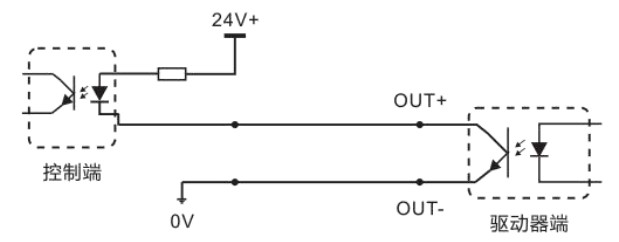
O porto ALM úsase para transmitir o estado de funcionamento do controlador a un circuíto de control externo. Cando o controlador está no estado de erro e no estado de traballo normal, ALM emite diferentes niveis de optoacoplador.
O porto Pend úsase para emitir o sinal no lugar do controlador. Cando a diferenza (desviación de posición) entre a posición do comando de pulso enviada polo ordenador superior e a posición actual do servomotor paso a paso é menor que o valor establecido, o sinal no lugar é emitido. O ordenador superior recibe o sinal e confirma que o posicionamento está completo.
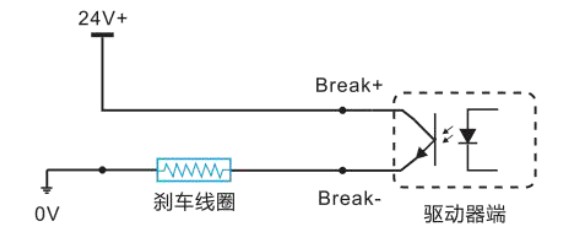
Ademais, os portos ALM e Pend pódense reutilizar como sinal de control de freo (rotura) a través do axuste de software, que se usa para controlar o interruptor de freo do servomotor paso a paso con freo. Dado que a bobina de freo é unha carga indutiva e o quecemento da bobina é grave cando o motor está en marcha, os clientes poden seleccionar un controlador de freo especial segundo as súas necesidades para reducir o quecemento do freo e mellorar a vida útil e a fiabilidade.
 Rtelligent ofrece solucións para controladores de freos dedicados, por exemploampos son os seguintes:
Rtelligent ofrece solucións para controladores de freos dedicados, por exemploampos son os seguintes:
Porto serie RS232

| S/N | Símbolo | Descrición |
| 1 | NC | |
| 2 | +5 V | Terminal positivo da fonte de alimentación |
| 3 | TxD | Terminal transmisor RS232 |
| 4 | GND | Terminal de terra da fonte de alimentación |
| 5 | RxD | Terminal receptor RS232 |
| 6 | NC |
O porto serie RS232 úsase para conectar o software de proba T86-IO e cambiar outros parámetros operativos relacionados do controlador.
A configuración dos interruptores DIP e os parámetros de funcionamento

A configuración da velocidade
| Velocidade | SVV1 | SW2 | SW3 | SW4 | Observacións |
| 100 | on | on | on | on | Outras velocidades pódense personalizar |
| 150 | apagado | on | on | on | |
| 200 | on | apagado | on | on | |
| 250 | apagado | apagado | on | on | |
| 300 | on | on | apagado | on | |
| 400 | apagado | on | apagado | on | |
| 500 | on | apagado | apagado | on | |
| 600 | apagado | apagado | apagado | on | |
| 700 | on | on | on | apagado | |
| 800 | apagado | on | on | apagado | |
| 900 | on | apagado | on | apagado | |
| 1000 | apagado | apagado | on | apagado | |
| 1100 | on | on | apagado | apagado | |
| 1200 | apagado | on | apagado | apagado | |
| 1300 | on | apagado | apagado | apagado | |
| 1400 | apagado | apagado | apagado | apagado |
Selección da dirección do motor
DIP SW5 úsase para establecer a dirección de marcha do motor baixo o pulso inicial. O "desactivado" significa que a dirección do motor é no sentido antihorario cando se introduce o pulso inicial; O "on" significa que a dirección do motor é no sentido horario cando se introduce o pulso inicial. O pulso inicial é o pulso de proba usado ao desenvolver o software do controlador; Consulte a dirección real de marcha do motor.
Selección de bucle aberto/pechado
DIP SW8 úsase para configurar o modo de control do controlador.
O "desactivado" significa o modo de control de lazo pechado;
O "on" significa o modo de control de lazo aberto e pódese usar para probar o motor.
Indicación LED de estado de funcionamento do controlador
| Estado LED | Estado do condutor | |
| O indicador verde está acendido durante moito tempo | O controlador non está activado | |
| O indicador verde parpadea | O condutor funciona normalmente | |
| Un indicador verde e outro vermello | Sobreintensidade do controlador | |
| Un indicador verde e dous indicadores vermellos | Sobrevol. de potencia de entrada do controladortage | |
| Un indicador verde e tres indicadores vermellos | O vol internotage do condutor está equivocado | |
| Un indicador verde e catro vermellos | O erro de seguimento supera os límites | |
| Un indicador verde e cinco vermellos | Erro de fase do codificador | |
Avarías comúns e solución de problemas
| Fenómeno | Posibles situacións | Solucións |
| O motor non funciona | O indicador de enerxía está apagado | Comprobe o circuíto de alimentación para a subministración de enerxía normal |
| O rotor do motor está bloqueado pero o motor non funciona | O sinal de pulso é débil; aumentar a corrente do sinal a 7-16 mA | |
| A velocidade é demasiado lenta | Seleccione o micro-paso correcto | |
| O condutor está protexido | Resolve a alarma e volva a alimentar | |
| Activar o problema do sinal | Levante ou desconecte o sinal de activación | |
| O pulso do comando é incorrecto | Comprobe se o ordenador superior ten saída de pulso | |
| A dirección do motor é incorrecta | O sentido de rotación do motor é inverso | Axuste o DIP SW5 |
| O cable do motor está desconectado | Comproba a conexión | |
| O motor só ten unha dirección | Erro de modo de pulso ou porto DIR danado | |
| O indicador de alarma está acendido | A conexión do motor é incorrecta | Comprobe a conexión do motor |
| A conexión do motor e a conexión do codificador son incorrectas | Comprobe a secuencia de conexión do codificador | |
| O voltage é demasiado alta ou moi baixa | Comprobe a fonte de alimentación | |
| A posición ou a velocidade é incorrecta | O sinal está perturbado | Elimine as interferencias para unha conexión a terra fiable |
| A entrada do comando é incorrecta | Comprobe as instrucións do ordenador superior para asegurarse de que a saída é correcta | |
| A configuración de Pulso por revolución é incorrecta | Comprobe o estado do interruptor DIP e conecte correctamente os interruptores | |
| O sinal do codificador é anormal | Substitúe o motor e contacte co fabricante | |
| O terminal do condutor queimado |
Curtocircuíto entre bornes circuíto |
Comprobe a polaridade da alimentación ou un curtocircuito externo |
| A resistencia interna entre os terminais é demasiado grande | Comprobe se hai algunha bola de soldadura debido á adición excesiva de soldadura nas conexións dos cables | |
| O motor está fóra tolerancia |
O tempo de aceleración e desaceleración é demasiado curto | Reduce a aceleración do comando ou aumenta os parámetros de filtrado do controlador |
| O par motor é demasiado baixo | Seleccione o motor con alto par | |
| A carga é demasiado pesada | Comprobe o peso e a calidade da carga e axuste a estrutura mecánica | |
| A corrente de alimentación é demasiado baixa | Substitúe a fonte de alimentación adecuada |
Anexo A. Cláusula de garantía
A.1 Prazo de garantía: 12 meses
Ofrecemos garantía de calidade durante un ano desde a data de entrega e servizo de mantemento gratuíto para os nosos produtos durante o período de garantía.
A.2 Exclúe o seguinte:
- A conexión incorrecta, como a polaridade da fonte de alimentación invírtese e insira/tire a conexión do motor cando a fonte de alimentación está conectada.
- Máis aló dos requisitos eléctricos e ambientais.
- Cambia o dispositivo interno sen permiso.
A.3 Proceso de mantemento
Para o mantemento dos produtos, siga os procedementos que se indican a continuación:
- Póñase en contacto co noso persoal de atención ao cliente para obter o permiso de reelaboración.
- O documento escrito do fenómeno de falla do condutor está anexo á mercadoría, así como a información de contacto e os métodos de envío do remitente.
Enderezo de correo:
Código postal:
Tel.:
szruitech.com
Documentos/Recursos
 |
Controlador paso a paso de bucle pechado RTELLIGENT T86-IO [pdfManual do usuario T86-IO, controlador de paso a paso de bucle pechado, controlador de paso a pasos de bucle pechado T86-IO |



